16
Too many em dashes? Spotting text written by chatbots is still more art than science
(indianacapitalchronicle.com)
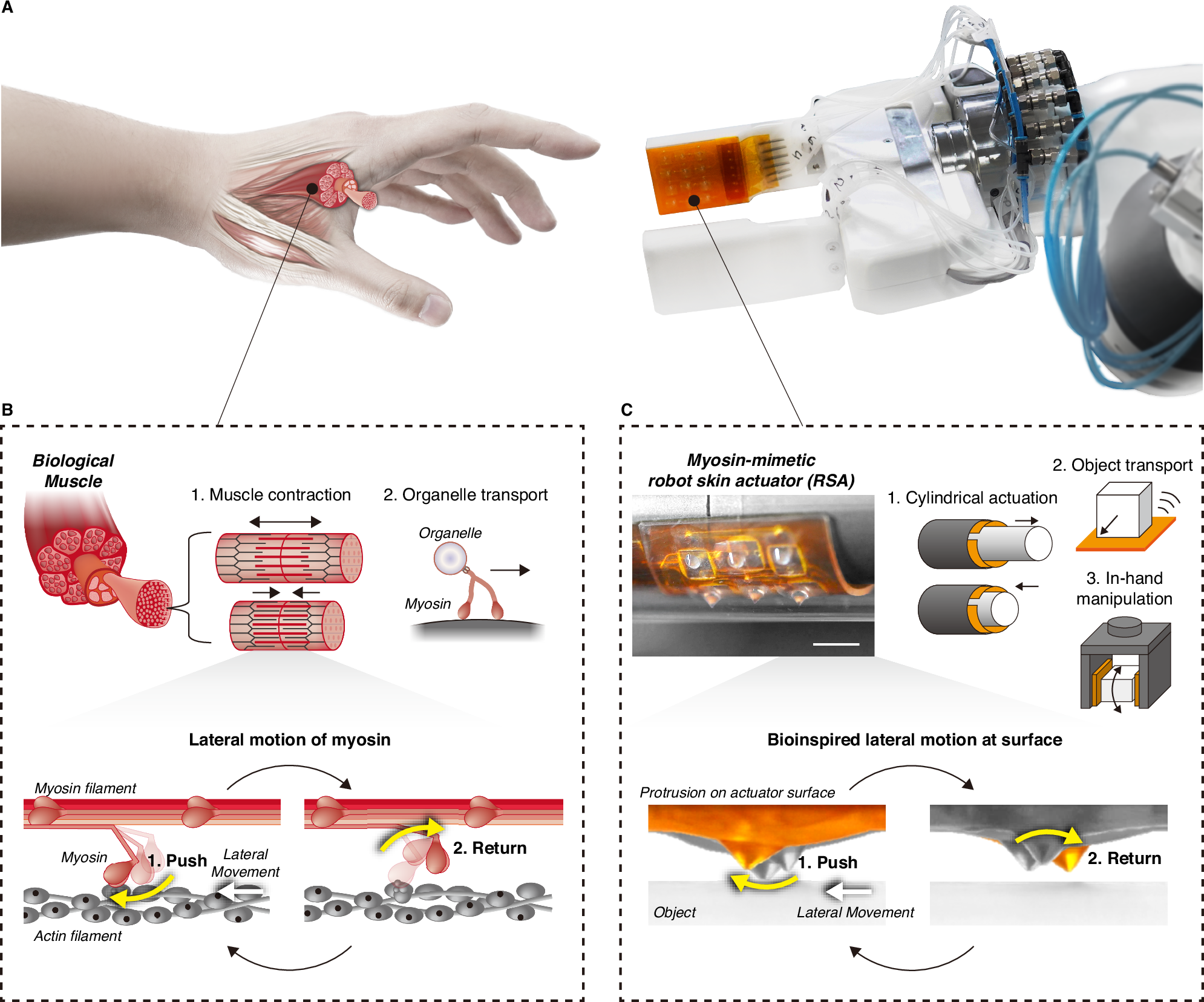
Actuators are an essential part of a robot, creating movement between the robot and its environment. Actuators with thin and flexible shapes can operate in a wider variety of environments, and actuators with multiple degrees of freedom can generate more complex movements. Here, we propose a soft pneumatic actuator in the form of a thin, flexible sheet that can generate different motion vector fields on its surface. The actuator contains dozens of thin pneumatic chambers and multi-channel pneumatic circuits connecting them in its thin body, converting input pressure into complex surface movements. Depending on the pressure sequence, it can produce surface movements in six different directions, at different speeds, and over different distances. The versatility of the proposed actuator is demonstrated through tasks such as obstacle removal in narrow pipes, in-hand manipulation, and underwater object transport.